
ساخت میکرورباتهای متحرک
ساخت میکرورباتهای متحرک
مجله علمی ایلیاد - تیمی از دانشمندان دانشگاههای کورنل و پنسیلوانیا، کلاس جدیدی از رباتها را ساختهاند که قطعات نیمهرسانا دارند و میتوانند با سیگنالهای استاندارد الکتریکی به حرکت درآیند. این رباتهای راه روندهی جدید، حدود ۵ میکرون ضخامت، ۴۰ میکرون عرض و بین ۴۰ تا ۷۰ میکرون طول دارند؛ هر ۱۰۰۰ میکرون یک میلیمتر است. هر کدام از این رباتها شامل یک مدار سادهی سیلیکونی بهعنوان مغز ربات و چهار محرک بهعنوان پا هستند.
این رباتها با ولتاژ پایین «۲۰۰ میلیولت» و توان پایین «۱۰ نانووات» کار میکنند، ولی در عین حال نسبت به اندازه، رباتهای قدرتمندی هستند. پروفسور «مکایون» از دانشگاه کورنل بهعنوان همکار این تحقیق، میگوید: «در زمینهی مغز رباتها در گذشته چیزی بهعنوان پایه وجود داشته و ما نیز از تکنولوژی نیمهرساناها استفاده کردیم و تنها آنرا در اندازهی کوچکتری به کار بردیم، ولی پاهای ربات قبلاً وجود نداشتند و نمیتوانستید از محرکهای کوچکی که با سیگنالهای الکتریکی فعال میشوند، بهعنوان پا استفاده کنید. بنابراین ما این پاها را اختراع کردهایم.»
پروفسور مکایون و همکارانش پاهای ربات را با لایهنشانی اتمی و لیتوگرافی نوارهای پلاتینی ساختهاند. قطر لایههای اتمی روی این پلاتین، تنها چند اتم است. زمانی که شارژ مثبت الکتریکی به پلاتین میرسد، یونهای باردار منفی موجود در محیط اطراف، به سمت سطح بیرونی آن جذب میشوند تا بار آن خنثی شود. این یونهای باردار باعث میشوند پلاتین تا حدودی متورم شده و خم شود. ضخامت و بهطور کل اندازهی بسیار کم پلاتین باعث میشود که بدون شکستن خم شود. دانشمندان برای اینکه حرکت سهبعدی این نوارهای پلاتینی را کنترل کنند، یک لایهی پلیمری محکم در نوک آن وصل کردهاند. فاصلهای که بین پلیمر و پلاتین وجود دارد، مانند زانو عمل میکند و به پاها اجازه میدهد تا خم شدن کنترل شدهای داشته باشند و به این ترتیب، حرکت ایجاد شود.
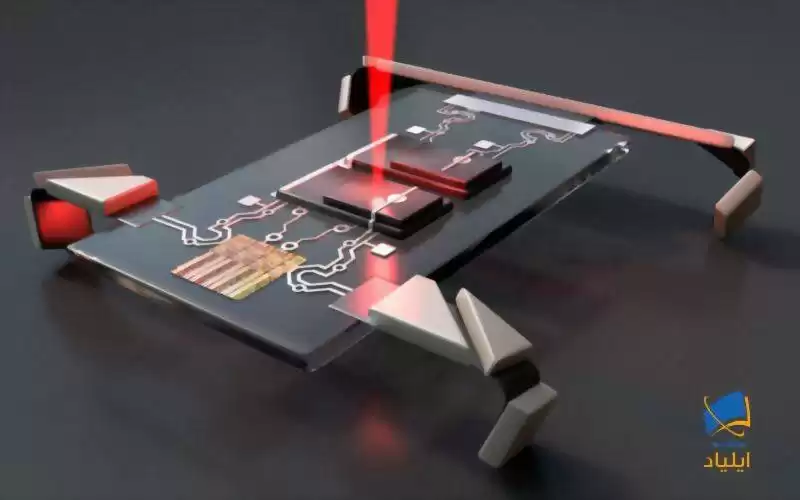
محققین برای اینکه بتوانند ربات را کنترل کنند، از پالسهای لیزر در تناوبهای متفاوت برای ایجاد حرکات مجزا در پاها استفاده میکنند. در واقع با قطع و وصل کردن لیزر بر روی پاهای متخلف، آنها را به نوبت تحریک میکنند و به این ترتیب ربات راه میرود.
پروفسور «ایتای کوهن» بهعنوان همکار این تحقیق، میگوید: «هر چند این رباتها از نظر عملکردی در ابتدای راه خود هستند و سرعت خاصی ندارند و تواناییهای محاسباتی زیادی نیز ندارند، ولی نوآوریهایی که در آن به کار رفته، میتواند راه را برای تولید رباتهای پیشرفته و هوشمند هموار کند.»